欢迎访问厦门中科汇普商业管理有限公司网站!

扫一扫了解更多资讯

欢迎访问厦门中科汇普商业管理有限公司网站!
扫一扫了解更多资讯
鉴于近期在跟客户朋友沟通中,一直避不开的一个问题,SLAM是什么?有什么优势等一系列问题,今天我们就聊聊它。
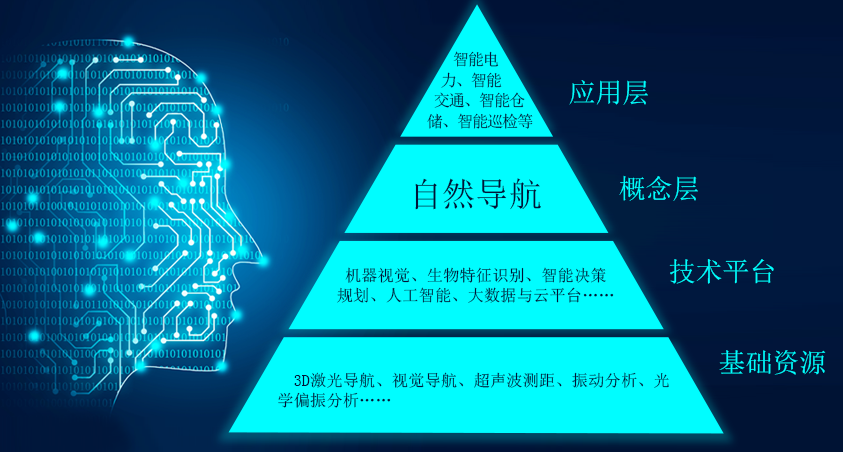
SLAM算法目前是更接近于人的认知和判断的导航模式,机器人在导航中需要解决的三个一般性问题:在哪儿?想要去哪儿?怎么去?——成为了自然导航最初的构想理念。
尽管导航方式不断发展,但无论有轨导航、磁导航,还是激光导航,都没法避开一个很大的痛点——人工设置路标需要较长的安装时间和环境改造成本。而要解决这个问题,就需要在环境地图未知的情境下,通过更丰富的智能感知系统,借助自然本来具有的环境特征,实现移动机器人的自定位和导航。尽可能模仿人类的导航逻辑,来解决上述“我在哪儿?我想要去哪儿?我怎么去?”的问题。
在针对性的改善传统痛点并解决以上三个问题方面,自然导航的实现路径为:机器人在未知环境中某一位置出发,通过多种仿生、类人化的环境感知传感器持续的判断所在环境中各类标志物体的自然特征,持续进行数据集成和融合分析,进行自定位的同时建立连续的环境地图,并在此基础上实现移动机器人的导航与路径规划,完成导航任务。


首先,在行业通用技术基础上升级。在建立原始路径基础上,还可随时根据外界环境变化进行灵活的路径响应,如果原有路径上有障碍物突然出现、消失或移动,各类传感器会将这种变化反馈给系统中枢,驱使机器人重新规划最优路径。
其次,与大部分自然导航概念只强调激光与视觉不同,产品对于自然导航的诠释甚至还包含了对于周围声音、光线、振动频率的感知,搭载了丰富的自然信息处理系统。
总的来说,“自然导航”更接近于人在运动时的认知和判断逻辑,从而让移动机器人更加灵活自如,从“幼童”变成“高智商青年帅哥”,使得在产品应用中变得更智能,更有更有竞争力。
自然导航+人工智能:仓储AGV及户外巡检的核心竞争力。自然导航既然更加先进,为什么目前业界仍未将其作为主流技术进行应用呢?
主要有三大技术难点:
其一,SLAM的算法非常复杂;
其二,从二维到三维的跨越较难实现,从三维到多维信息融合更难实现;
最后,核心问题还在于,越来越多的环境,需要多台机器人联合作业,而多机器人之间的通信拓扑、任务规划和地图融合,这对于缺乏大环境下多机器人协作经验的企业来说又是一大难题。
其实业界上并不乏成功经验。比如工业4.0的德国,在运动控制领域就拥有众多技术卓越的厂商,瑞典某知名企业便以其NDC8系统提出使用自然导航技术而备受业界关注。紧随其后,瑞士某知名企业也在2016底携其自然导航技术全面进军中国市场。
回到国内,优秀的运动控制厂商当然也不会坐等国外巨头将导航市场分食,纷纷拿出自己的看家本领。目前中科汇普AGV产品应用中大部分采用SLAM+激光,主要是考虑产品的安全和稳定性,也是根据不同应用环境。
